
Fig. 4
- ID
- ZDB-FIG-221031-16
- Publication
- Durrer et al., 2022 - A robot-assisted acoustofluidic end effector
- Other Figures
- All Figure Page
- Back to All Figure Page
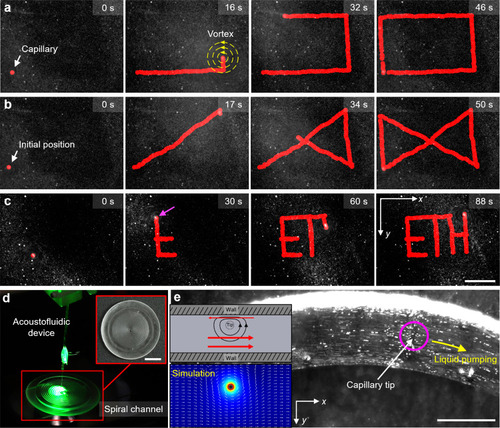
Image sequences depicting the robot-assisted acoustofluidic device executing automated patterns (here the red marking represents the path of the capillary tip and yellow concentric circles represents the vortex generated) (see Supplementary Movie |