
Figure 7
- ID
- ZDB-FIG-220416-27
- Publication
- Garg et al., 2022 - A Markerless Pose Estimator Applicable to Limbless Animals
- Other Figures
- All Figure Page
- Back to All Figure Page
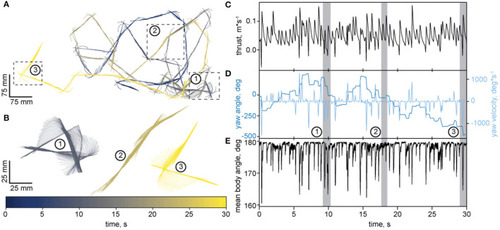
An example trajectory of an adult zebrafish traced with LACE. |